In order to make use of CAN BUS data in AVL platform, the GPS device installed in the vehicle should be compatible to read CAN BUS data protocol j1708, j1939 etc.
High end device models of Ruptela and Teltonika devices such as TCO4 LCV/HCV, FMB series etc which support CAN bus decoding are integrated with AVLView application.
If the GPS tracker is able to send CAN params to AVL server, the CANBUS details can be enabled using below steps.
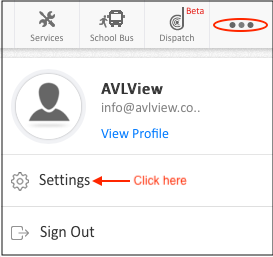
Step 1: Click ‘Settings” tab from top right corner of the screen (full screen mode)
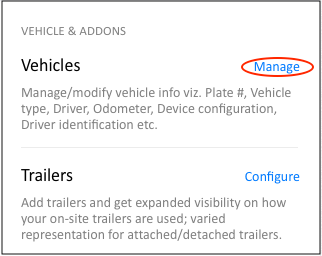
Step 2: Click “Manage” option in ‘Vehicles’
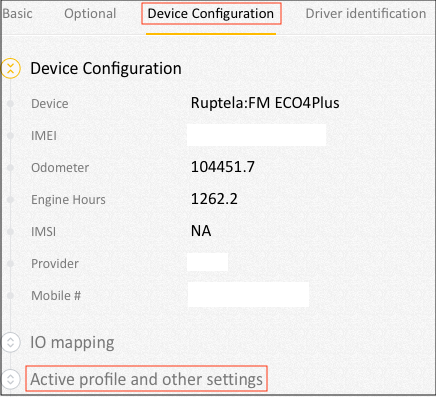
Step 3: Choose your vehicle from the list and from device configuration tab, click “Active profile and other settings”, then click “Edit”
Step 4: Enable CAN and CAN Speed then click “submit”




